|
SteerVu™ provides the GNT
auto-steering logic controller with high-accuracy, high-performance GPS
navigation solutions and attitude information. SteerVu™ steers vehicles
such as rubber-tired gantry (RTG) cranes, cargo transport vehicles, lawn
mowers and tractors using a “map and match” mode of operation. SteerVu™ is
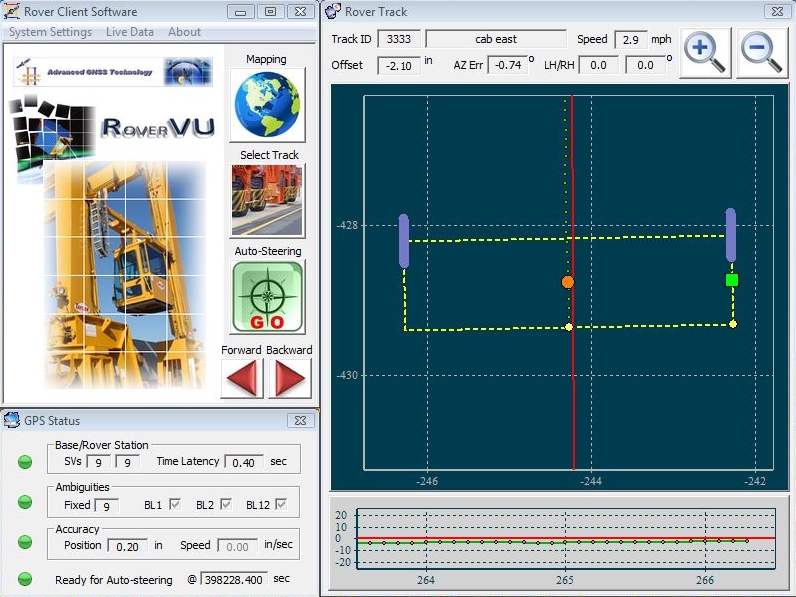
designed for use in repetitive navigation applications. SteerVu™ consists of a Base Server
(BaseVu) and a Rover Client (RoverVu). BaseVu is connected with one or
more GPS Base Stations. BaseVu receives raw GPS observations from the Base
Station(s) in real-time. The status of the Base Station(s) is constantly
monitored. RoverVu is installed on a vehicle and is connected with BaseVu.
Upon receiving a request from RoverVu, BaseVu transmits the raw GPS
observations received from the Base Station(s) to RoverVu.
Map and match programming allows a human operator to map a navigation path
by driving the vehicle over the path to be matched while RoverVu is in
“map” mode. During map mode, RoverVu records and stores GPS positioning
data which allows RoverVu to autonomously reproduce the mapped path.
Multiple paths can be mapped and stored for a project site. Each path is
uniquely defined by the GPS coordinates within the path. Navigation paths
are stored locally in RoverVu memory and can be downloaded to a removable
USB flash memory drives.
With the navigation paths stored, the vehicle is capable of retracing the
mapped paths whenever necessary. When the vehicle is in the vicinity of
the desired path, the operator can select the desired navigation path to
be matched from a list of paths saved for the site in RoverVu memory. Once
the path has been selected and connection to BaseVu has been achieved, the
operator moves the vehicle near the start of the navigation path. The
operator then places the vehicle in automatic operation mode and the
vehicle enters the navigation path, moving to the desired locations
automatically.
The GPS RTK (Real-Time Kinematic) technique allows the vehicle to know
precisely where it is on the surface of the earth to a positional accuracy
of better than one inch. Under purely robotic control, the vehicle will
wander off course due to errors caused by wheel slippage, uneven terrain,
and other mechanically-induced errors. RoverVu makes use of its GPS RTK
navigation solutions and attitude information to correct for errors in the
vehicle control system. In typical conditions where satellite visibility
is favourable and the vehicle is well calibrated, the navigation path can
be tracked to better than plus or minus two inches. |

