|
Machine Autosteering
SteerVu™ Machine Control and Guidance Systems
SteerVu™ is an advanced, Global Positioning System (GPS)
auto-steering package utilized for applications requiring centimetre level
positioning accuracy. Its applications include automated guidance of
cranes, lawnmowers and agricultural machinery [read more].
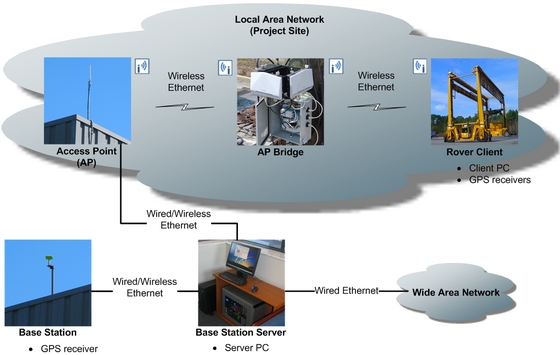
Figure 1: GNT Autosteering System
Configuration
Technology
Overview
Gemini Navsoft Technologies (GNT)’s
high precision, autosteering technology can be integrated to allow for
customizable levels of automation to be performed for repetitive
navigation applications. We integrate the most cost effective components
which offer the highest performance. The result is a commercially-viable,
low-cost, high precision autosteering system that can be placed within
financial reach of the commercial user.
GNT helps customers automate navigation tasks by applying five key
technologies:
-
Broadband data
communications
-
Off-the-self GPS
receiver interface
-
GPS RTK
(Real-Time Kinematic) navigation solution
-
Map and match
operation
-
GNT
auto-steering logic controller
|
GNT GPS auto-steering
performance |
|
Real time GPS solution outputs |
Position, velocity and heading
Acceleration (optional) |
|
GPS position accuracy¹ |
Typically
± 4 mm (0.16″) (1 σ) |
|
GPS heading accuracy² |
Typically
± 0.02˚ (1 σ) |
|
Real time auto-steering commands |
wheel turning direction (left, right or neutral) and ground speed |
|
Auto-steering accuracy³ |
Typically
± 5 cm (1.97″) (1 σ) |
|
¹ Measured by the misclosure
of 3 baseline solutions independently obtained
using 1 base and 2 rover
antennas.
² Given as the
ratio of GPS position accuracy and the distance of 2 rover antennas.
³ Measured by the off-track distance of the
rubber-tired
gantry crane @ 10 Hz update rate.
|
|
GPS
Autosteering Kit Components
|
 |
GPS Autosteer Controller
GNT's GPS Autosteer Controller is used to derive
GPS-based real-time dynamics (position, heading, velocity and
acceleration) of the vehicle and generate steering commands for the
vehicle. |
|
 |
GPS
Stations
GNT GPS
Stations are used to monitor vehicle's dynamics and serve as reference
stations. |
|
 |
CAN USB Interface
GNT's CAN USB Interface is used to easily connect several CAN
interfaces to a standard PC. |
|
 |
Access Point Stations
GNT’s AP
Stations are used to establish a local Wi-Fi network Access Point for
streaming data wirelessly between GPS Stations and the GPS Autosteer
Controller. |
|
 |
Ethernet
Switch
GNT’s Ethernet Switch is used to establish a wired
local area network among GPS Stations, Access Point Stations and the
GPS Autosteer Controller. |
|
 |
DC Power Supply
GNT’s DC
power supply option is used when AC power is available at the project
site. |
|
 |
Uninterruptible Power Supply
GNT’s UPS
options are used to provide power backup for safety critical
applications. |
|
 |
Enclosure
GNT’s
Enclosure option is used to protect equipment from the weather. |
Download
|
